20年に及ぶ研究の成果「リーンステア制御」で、いざ、次世代モビリティの社会実装へ
2025.01.20

免許返納後の高齢者や、交通手段が限られた地域の新たな移動手段として、1人乗りの小型モビリティが注目されています。これまでになかったモビリティを創造していく段階なので、その形や乗車姿勢は多種多様。そんな小型モビリティの中でも「倒れない小型モビリティ」に対してさまざまな技術開発が行われています。
アイシンが東京大学生産技術研究所須田研究室と共同開発した、小型モビリティ制御の要となる「リーンステア制御」は、その中でもひときわ注目を集める技術です。2024年6月には小型モビリティを手掛けるglafit株式会社と共同でこの技術を搭載したプロトタイプ車両を用いた実証実験を開始しました。今回は「リーンステア制御」の開発ストーリーを紹介します。
リーンステア制御とは
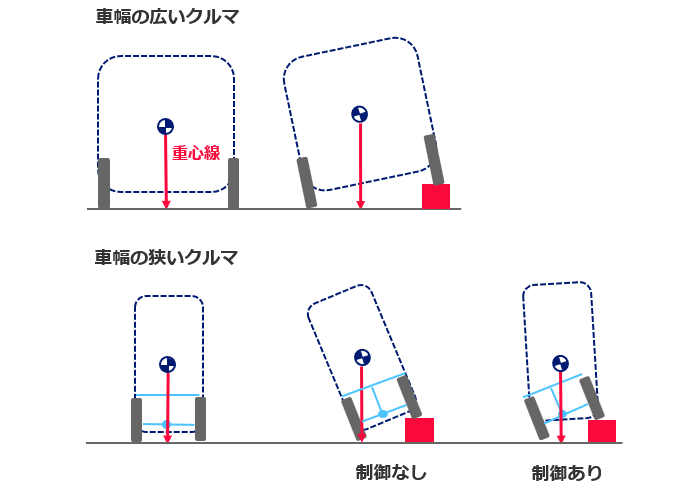
小型モビリティは全幅が狭く、後輪を二輪設けても転倒しやすいのが課題で、これを解決する技術が求められていました。仮に車幅が1/2倍になった場合、同じ段差高を片輪のみ乗り越えた時の車体の傾きは2倍となり、車両の安定性は1/4となってしまいます。「リーンステア制御」とは、路面の傾き、車速、ハンドル角等の情報に基づき、車体の傾斜角や前輪の舵角を制御することで、二輪車並の幅の狭い車両においても高い自立安定性を実現できる技術です。
小型モビリティへの挑戦は20年以上前から
「小型モビリティ」という乗り物が話題となっているのはここ数年の出来事ですが、実はアイシンが小型モビリティ制御のキーとなる技術を完成するまでには20年以上の研究の歴史がありました。
この技術の基となった「1人乗りの小型車」が形となったのは2004年。アイシンの技術開発に長年携わり、このプロジェクトでも数々の場面でサポートを行った堀口は当時をこう振り返ります。

「もともとはアイシンの研究所である『株式会社エクォス・リサーチ』で、1985年に生まれた『馬のようなクルマをつくりたい』という構想から企画が始まりました。このプロジェクトでは様々な研究開発が行われたのですが、電気自動車やインホイールモーターといった技術も含まれていました。そのとき得た知見や技術を使って、未来に1人乗りの乗り物があったらどうなるか?と考え作ったのが1人乗りの小型車『Uni car(ユニカー)』でした。」(堀口)
この小型車は二輪の上にシートを載せた一見すると非常にシンプルなモビリティ。センサーを用いた制御技術によりシートを前後させ、乗員をバランサーとして機能させることにより、転倒を防いでいました。

一度お蔵入り寸前までいった技術を、別のメンバーが再研究
その後、1人乗り小型車を商用的に成功させるために前輪を取り付け、トライク(三輪の乗り物)のような形状にした『e-Trike(イートライク)』へと進化。それでも最終的に商用モデルとして販売されることはなく、小型モビリティのプロジェクトはお蔵入りになるかと思われました。しかし「この技術は面白い」と感じて、さらなる研究を続けたのが水野でした。

「この小型モビリティの転倒抑制技術に興味があって、開発が中断されるのはもったいないと思い、2014年頃に開発車両を譲り受けて研究を進めました。ジョイスティック※で後輪の傾きだけを制御する開発車両へと進化させたのですが、これが想定よりもスムーズに動いて、可能性を感じましたね。」(水野)
※レバーを傾けることで方向操作を行うもの
アイシンには頭の中や机上だけでなく、実際に作って案や策を考える「手で考える」という信条があります。水野の行動は正に「手で考える」を体現していたと言えるでしょう。他の仕事と並行研究ではあったものの、興味があるものづくりの研究開発をしやすい環境こそ、時代をリードする新技術を生み出してきたアイシンの強みです。
しかしそんな水野のチャレンジも順風満帆とはいきませんでした。可能性を感じた開発車両の商用化を見据えた試験段階で、途端に上手く走行できなくなってしまったのです。「狭いスペースでも駐車できるよう車体の幅を狭めたらロール振動(横揺れ)が止まらなくなってしまったんです。これにはとても悩まされました。」(水野)
そこで、共同研究先の東京大学生産技術研究所教授の須田先生のご指導を仰ぎながら前輪の二輪化などの改善策を実行しました。これにより、ロール振動の問題は解決。多くの開発パートナーが安定して曲がれることに驚き、途中他社メーカーとの共同開発も進みました。
新たに加わった制御開発担当は、理想を実現するため東大の博士課程へ
途中他社メーカーとの共同開発などもありましたが、アイシンの考える小型モビリティを実現するために、原点に立ち返って幅の狭いモビリティを独自で研究開発する流れへ。ここで安定して走行できる小型モビリティ実現に向けてキーマンとなったのが、新たにプロジェクトリーダーとなった荒木でした。

「e-trikeに黒い外装を取り付けて、幅を狭めたところからこのプロジェクトに参加したのですが、先に水野が説明したようにロール振動に悩まされていました。そこで以前からアイシンとして共同研究を進めてきた東京大学生産技術研究所教授の須田先生(制御動力学のスペシャリスト)に相談したんです。」(荒木)

ここから見えてきたのは、全幅やホイールベースを始めとする各種数値的に、横方向の傾きであるロール方向の揺れ(横揺れ)とステアリングの揺れが共振してしまう数値があることがロール振動に影響しているという発見でした。荒木はロール(横揺れ)とステア(旋回)の共振が起きない設計数値や前輪の機構にすることで、ロール振動を回避することを可能としました。その後、荒木は東京大学の博士課程に入学し、車両運動制御の研究に専門的に取り組みました。
「車両運動制御を究める為、アイシンの会社員を続けながら東京大学の博士課程に入学しました。そこで見えてきたのは、幅が狭くて背の高いクルマをどんな車速でも安定して走行させるためには、リーン(車体の傾き)とステア(旋回)の統合制御が必要であることでした。」(荒木)
こうして誕生したリーンステア制御。2022年に荒木は見事博士号を取得しました。「須田先生や皆さんに支えられて…」と終始語っていた荒木ですが、本人の努力も大いに関係しているはずです。
「手で考える」を実践し、制御技術の最後のピースがはまる
ただ、リーンとステアを統合制御するということは、一般的に考えるとステアリング機構に何かしらの電子的な制御を加える必要があります。そうしてしまうと価格が上がり、小型モビリティとしての製品需要が無くなってしまうのも問題です。そこで荒木は、アイシンの「手で考える」を実践してこの問題解決を実現しました。
「リーンステア制御の一部を簡単に説明すると、幅の狭い車両を安定して走行させるためには、リーン(車体の傾き)に対してステアリングが少し逆方向に操作されるのが正解なんです。乗員の操作に対してステアリングを逆方向に操作するには、コンピューターなどの制御が必要かと思いますが、機械的な仕掛けで適切に操作することができるのでは?と思いすぐに試してみました。これが思った以上にうまくいきました。」(荒木)
こうして荒木は、ついに「幅が狭くても安定して走行できる小型モビリティ」の軸となる技術を完成に導いたのです。
リーンステア制御を小型モビリティのスタンダードに
実現の可能性が見えてきた「幅が狭くても安定して走行できる小型モビリティ」。その背景には社会的な変化も味方をしてくれています。
「特定小型原動機付自転車という新たな車両区分が法改正により設けられ、2023年から施行されました。この新制度の車両は車幅を60cm以内に収める必要があり我々が長年研究してきた技術はバッチリはまるので、続けてきた研究がようやく社会に出るチャンスを迎えたなと感じています。今後高齢者の免許返納問題などにより、地方では小型モビリティが必要になってくる社会文化が根付くはずと捉えています。高齢者でも安心して乗車することができるこの技術が、多くの人の移動の自由や喜びに貢献するはずです。四輪の特定小型原動機付自転車には、この技術が必須だと感じていただけるよう、今後もこの新しい価値の社会実装の推進に取り組んでいきたいですね。」(堀口)
ようやく日の目を見ようとしているリーンステア制御。その実現の背景には、将来のための研究開発に力を入れるアイシンならではの開発環境があります。この技術を小型モビリティのスタンダードに。プロジェクトが今後、モビリティ社会へどのような影響を与えていくのか、ご期待ください。

『リーンステア制御』の詳細につきましては研究開発の成果をまとめた論文などを発表しております。以下リンクからその一部をご参照ください。
この記事をシェアする










AI Thinkの最新情報は
公式X(旧:Twitter)で発信しています



