Boosting next-gen mobility vehicle adoption with Lean-Steering Control Technology
Jun.30, 2025

Compact Mobility Vehicles (CMVs), designed for a single rider, are gaining attention as a new mobility solution—especially for seniors who have surrendered their driver’s licenses or live in areas with limited transportation options. As society explores alternatives to conventional vehicles, CMVs are emerging in various shapes and driving styles, pushing the boundaries of design and safety. One major challenge in this evolution is preventing rollovers, a risk due to the vehicles’ small size and unique dynamics.
To address this, AISIN—together with the Suda Laboratory at the University of Tokyo’s Institute of Industrial Science—developed a lean-steering control technology that enhances vehicle stability and rider safety. This innovation became the focus of a joint field test launched in June 2024, in collaboration with CMV developer glafit Inc., using a prototype equipped with the technology. This article explores the journey behind the development of lean-steering control and its potential to transform compact mobility.
The need for new technology
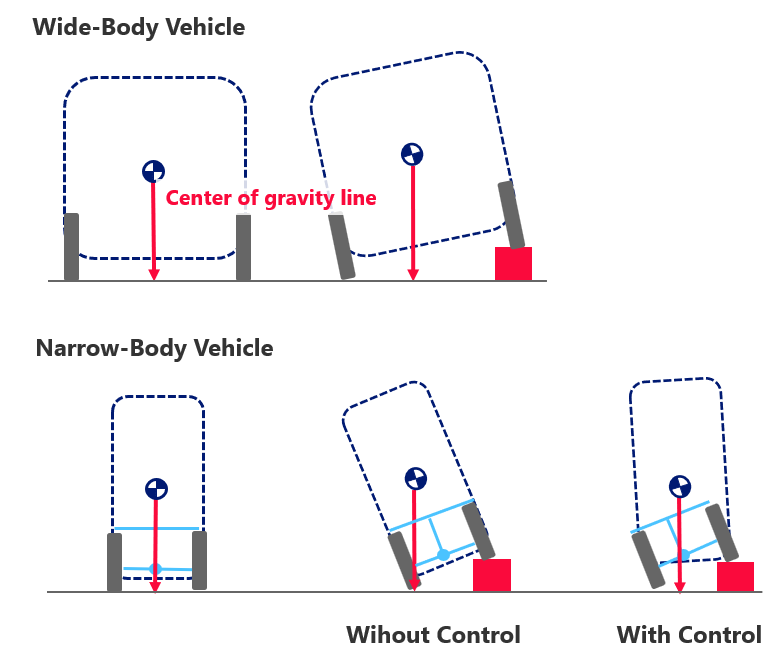
Traditionally, CMVs have featured a narrow body width, making them prone to rollovers—even when equipped with two rear wheels. This presented a need for a new stability solution. Halving the vehicle’s width, for example, doubles its body tilt when traversing the same surface irregularity on a single wheel, reducing overall stability to one-quarter. Lean-steering control addresses this issue by significantly enhancing rollover stability. It does so by precisely controlling both the vehicle’s body inclination and the front-wheel steering angle, using inputs such as road surface tilt, vehicle speed, and steering angle.
Two Decades of CMV Innovation
CMVs have become a hot topic in the past several years. In fact, AISIN has spent more than 20 years on research until it perfected the key technology for controlling CMVs.
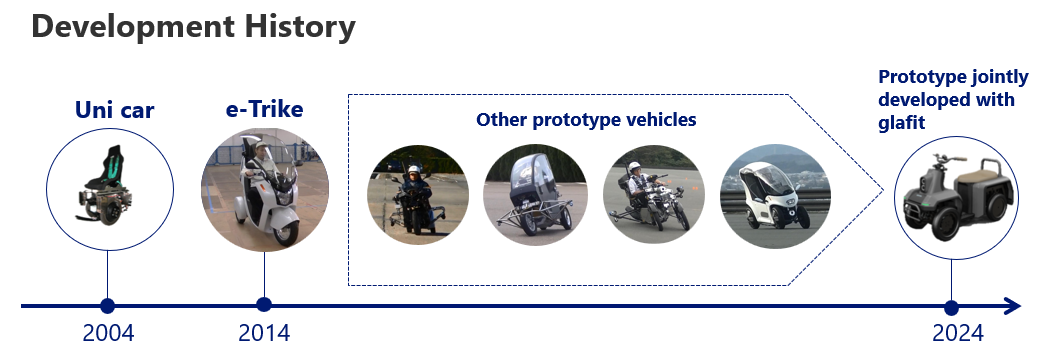
The concept of the one-seater compact vehicle, which served as the basis for this technology, was embodied in 2004. Munehisa Horiguchi, who has long been involved in AISIN’s technology development and has frequently provided support in this project.

“The project originated from a concept formulated in 1985 to ‘create a vehicle like a horse’ at EQUOS RESEARCH Co., Ltd., an AISIN laboratory,” said Horiguich. “This project involved R&D on various technologies, such as electric vehicles and in-wheel motors. We came up with a concept for a future one-seater vehicle, based on the knowledge and technologies derived from the project, and developed the Uni car, a one-seater compact vehicle.”
Apparently, this was a very simple mobility vehicle with a seat installed on two wheels. Sensor-based control technology allowed the driver to function as a balancer by moving the seat back and forth to prevent rollover.
Nearly shelved, research continues
Later, to make a commercial success, a front wheel was attached to the one-seater compact vehicle. The new vehicle was named the e-Trike because it resembled a tricycle (a three-wheeled vehicle). Nevertheless, it was not sold as a commercial model in the end, and the CMV project was expected to be shelved. However, Akira Mizuno took an interest in this technology and sensed the potential of success, so the research continued.

“I was interested in rollover control technology for the compact mobility vehicle,” said Mizuno. “I thought that it would be a loss to discontinue the development so I acquired the prototype vehicle in 2014 to continue the research. The prototype vehicle evolved to control only the inclination of the rear wheels using a joystick.* It worked more smoothly than expected, and I sensed the potential.”
* Used to change the direction by tilting the lever
At AISIN, the philosophy of “thinking with your hands” emphasizes generating ideas through hands-on fabrication—not just theoretical planning or desk work. Project leader Mizuno embodied this mindset by actively conducting research while juggling other responsibilities, turning concepts into tangible progress. This hands-on approach is a hallmark of AISIN’s R&D culture, where engineers are empowered to explore areas of personal and technical interest. It’s this environment that has fueled the company’s track record of pioneering technologies and breakthrough innovations.
Mizuno’s path to commercialization was anything but smooth. Although the prototype once showed promise, it struggled during the initial test phase and failed to perform as expected. “I narrowed the vehicle body to allow parking in tight spaces, but that led to persistent roll oscillations—side-to-side instability that became a major issue,” Mizuno explained.
To address the problem, improvements were made under the guidance of Professor Suda from the University of Tokyo’s Institute of Industrial Science, a key partner in the joint research. One major enhancement was switching to a two-front-wheel design, which successfully eliminated the roll oscillations. The result was a remarkably stable cornering performance that impressed many development partners and helped accelerate collaboration with other manufacturers.
Driven by Vision, Project Leader Enrolls in University Doctoral Program
Despite joint development efforts with other manufacturers over time, AISIN decided to return to the origin and independently conduct R&D to realize a narrow CMV. Keizo Araki, a new project leader, became the key person to comprehend a compact mobility vehicle capable of stable driving.

“I joined the project when black exterior parts were attached to the e-Trike and the width was reduced,” said Araki. “As Mizuno explained earlier, we were troubled by the roll oscillations. I asked for advice from Professor Suda (a specialist in control dynamics) who had conducted joint research with AISIN for years.”

Analysis of numerical data—including total vehicle width and wheelbase—revealed that instability was caused by resonance between roll oscillations (side-to-side body tilt) and steering oscillations. To address this, Araki refined the design by adjusting key parameters and implementing a front wheel mechanism that effectively decoupled roll motion from steering behavior, eliminating the resonance issue. His deepening interest in this challenge led him to pursue a doctoral program at the University of Tokyo, where he specialized in vehicle dynamics control.
“While continuing my career at AISIN, I entered the doctoral program to deepen my expertise in vehicle dynamics,” Araki explained. “Through my research, I discovered that maintaining stability in narrow, tall vehicles at any speed requires an integrated control system that manages both lean (body tilt) and steering (cornering).”
This led to the development of lean-steering control. In 2022, Araki successfully earned his doctoral degree. Though he made great personal and professional efforts, Araki emphasized that this was possible “thanks to support from Professor Suda and others.”
Solve the problem: think with your hands
However, in general, integrated control of the lean and steering required addition of some electronic control to the steering mechanism. This was likely to result in higher prices and slash the market demand for the CMV. Araki practiced AISIN’s “think-with-your-hands” approach to solve the problem.
“Let me explain part of lean-steering control briefly. To ensure stable driving of a narrow vehicle, the solution is to realize slight counter-steering against the lean (inclination of the vehicle body). You may think that computer control is required to realize counter-steering against the driver’s maneuvering. I came up with an idea to realize proper control using a mechanical device and tested it immediately. This worked better than I expected,” said Araki.
This is how Araki finally led the core technology for “narrow compact mobility vehicles capable of stable driving” to perfection.
Making lean-steering control a standard feature of CMVs
The realization of narrow CMVs capable of stable driving is close at hand. Social changes are also on our side.
“A new vehicle category called specified small motorized bicycles was established based on amendment of the law, which came into effect in 2023. The width of vehicles under the new system must be within 60 cm. The technology that we have researched for many years perfectly meets the requirement. It is finally ready to be marketed. In local areas, a social culture in which compact mobility vehicles are required will be accepted as more elderly people return their driver’s license in the future. This technology, which enables even elderly people to drive safely, will contribute to greater freedom and joy of mobility for many people. I will continue to promote social implementation of the new value so that this technology is received as an essential requirement for four-wheeled specified small motorized bicycles,” said Horiguchi.
Finally, lean-steering control is about to see the light of day. It has been made possible by AISIN’s unique development environment, which focuses on R&D for the future. Please keep an eye on how this project, which aims to make this technology a standard feature of CMVs, will benefit our mobility-centered society.

For details of lean-steering control, AISIN has published papers that compiled R&D results. Some of them are accessible from the following links.
Share this article